Sailbot
Published on: December 23, 2025
Updated on: June 16, 2026
2 min read

Overview
Sailbot is a robotics club I’ve been a part of at Pitt for the past 4 years. We compete anually at the International Robotics Sailing Regatta. I’ve worked on a lot over the years and trying to document everything here is frankly impossible. However, for more in-depth information about our tech stack, I’ve kept our documentation site and codebase public. Keep in mind these are live, and may have changed significantly by other members since I’ve graduated.
Some of the major projects and skills I’ve learned during Sailbot are listed below:
- Autonomy for various events to demonstrate autonomous GPS navigation, search and rescue and station keeping
-
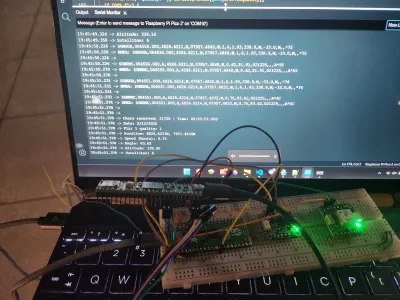
Controlling embedded GPS, RTK, IMU, RC receivers, water sensors and motors with our microcontroller
- I’ve made many changes from new things I’ve learned over the years. This led me to implement a Hardware-Abstraction-Layer to manage the dozens of configurations and different boats we have.
- SPI/I2C/UART protocols
-
Data serialization & DDS with protocol buffers and ROS2
-
CI/CD testing & linting with Github Actions
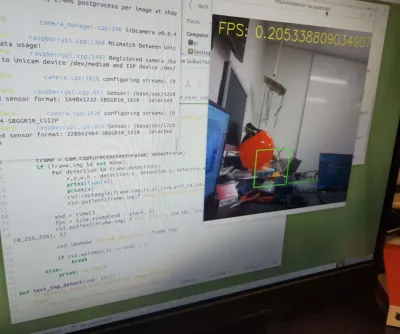
- A Pan-Tilt-Zoom camera running an AI object detection I trained using YOLOV8 with a custom dataset I painfully labeled
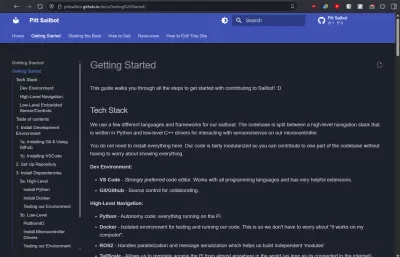
- Front-end website and documentation with building our main site and using mkdocs to build documentation for our new members
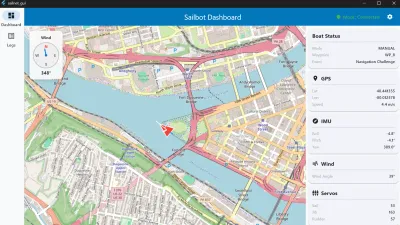
- A robotics GUI built in Flutter
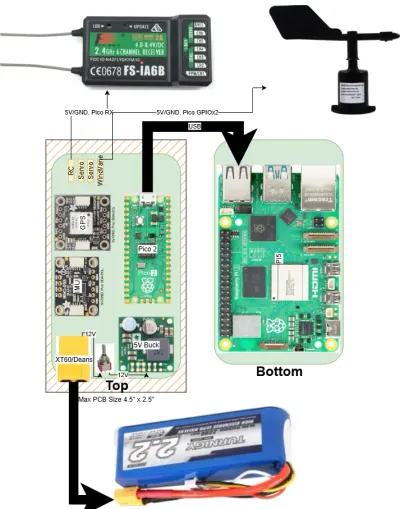
- PCB prototyping fundamentals so I can coordinate with our electrical team
- Multimeter/Oscilloscope debugging
- Soldering
- Wire crimping
- Understanding datasheets

- Management & soft-skills from coordinating a sub-team of ~12 people